Rozmieszczenie portów
Właściwe rozmieszczenie portów ma zasadnicze znaczenie nie tylko dla zminimalizowania potencjalnych powikłań, lecz również dla skutecznego przeprowadzenia operacji. Platformy robotów chirurgicznych są wyposażone w system dwu- lub trójramienny. System dwuramienny jest tańszy, ale posługiwanie się nim w trakcie zabiegu wymaga współpracy asystenta. W naszym ośrodku chętniej wykorzystuje się system trójramienny zapewniający stabilne odsłonięcie pola operacyjnego w zastępstwie asystującego chirurga. Kolejne etapy wprowadzania portów przedstawiono na rycinie.
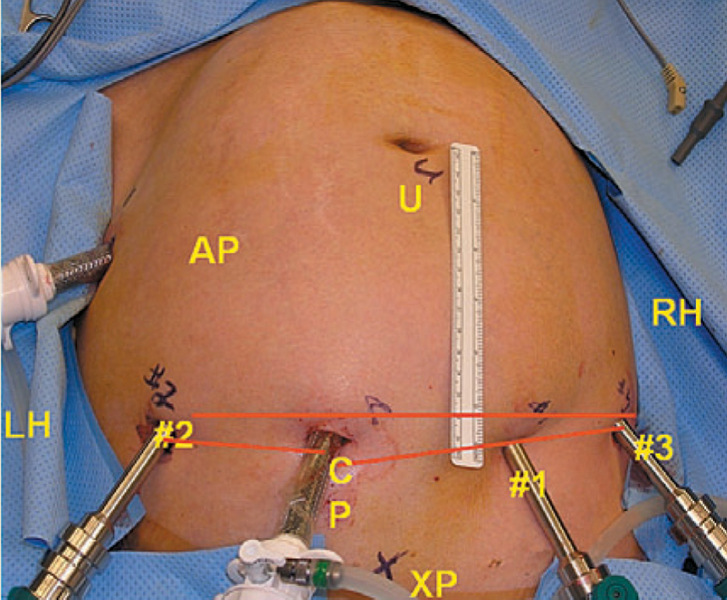
Rycina. Kolejność wprowadzania portów.
Krok 1: Planowanie wprowadzenia portów i dostosowanie ich położenia w zależności od dostępnej powierzchni powłok. Zasadniczą rolę odgrywa dostosowanie rozmieszczenia portów do powierzchni ściany jamy brzusznej chorej. Zazwyczaj rozpoczyna się od wprowadzenia portu dla kamery w linii pośrodkowej ciała na wysokości pępka. Następnie wprowadza się porty dla narzędzi robota, umieszczone bocznie od portu dla kamery w odległości 8-10 cm. U szczupłych chorych powinno się jednak wprowadzić port dla kamery w odległości 2 cm bocznie od pępka, przeciwstawnie do portów 1 i 3. Dzięki temu nie trzeba zakładać portu 3 w bocznej części jamy brzusznej, co mogłoby ograniczać ruchomość ramienia robota.
W naszym ośrodku porty 1 i 3 umieszcza się najchętniej w prawym górnym kwadrancie brzucha, głównie dlatego, że chirurdzy są na ogół praworęczni. Port 2 wprowadza się w lewym górnym kwadrancie brzucha, natomiast port dla kamery umieszcza się między portami 1 i 2 (rycina). Jeśli chirurg jest leworęczny, porty 1 i 3 umieszcza się w lewym górnym kwadrancie brzucha chorej, zaś port 2 w prawym górnym kwadrancie.
Po umieszczeniu portu dla kamery w linii pośrodkowej ciała nacina się powłoki brzuszne i wytwarza odmę otrzewnej, a następnie wyznacza miejsca wprowadzenia kolejnych portów. W miejscu portu dla kamery umieszcza się trokar o średnicy 12 mm, po czym przeprowadza się laparoskopię zwiadowczą, by ocenić czy, w jamie otrzewnej są zrosty. W naszym ośrodku wykorzystuje się w tym celu dodatkowy laparoskop o średnicy 5 mm, którym łatwo manewrować, jeśli trzeba uwolnić narządy ze zrostów.
Krok 2: Umieszczenie portu pomocniczego w lewym dolnym kwadrancie brzucha. Dodatkowy port umieszcza się po wprowadzeniu portu dla kamery. Znajduje się on 2 cm poniżej portu 2 po tej samej stronie w lewym dolnym kwadrancie brzucha, na wysokości kolca biodrowego przedniego górnego. Umieszczenie tego portu ma wiele zalet: pozwala uwidocznić nadbrzusze w trakcie wprowadzania narzędzi przez porty dla robota, dzięki czemu unika się uszkodzenia narządów wewnętrznych, umożliwia śledzenie i usunięcie igły ze szwem tak, by nie zgubić igły, zapobiega też krzyżowaniu się ramion robota podczas preparowania tkanek w obrębie miednicy. Jeśli w trakcie operacji stracimy odmę otrzewnej i porty dla robota się przesuną, wprowadzenie konwencjonalnego laparoskopu o średnicy 5 mm przez ten dodatkowy port pozwala uwidocznić, co się stało z portami dla robota bez konieczności ponownego podłączania kamery robota.

Film wideo 2. Umieszczenie portów i ich połączenia
Krok 3: Rozmieszczenie portów robota. Wykorzystanie konwencjonalnego laparoskopu o średnicy 5 mm wprowadzonego przez dodatkowy port pozwala na bezpieczne rozmieszczenie portów i narzędzi robota pod bezpośrednią kontrolą laparoskopową. Porty dla robotów wprowadza się zazwyczaj tak, aby były w jednej linii, co zminimalizuje stykanie się ramion robota. Umieszcza się je przeważnie na wysokości pępka. Należy je jednak umieścić bliżej głowy chorej, jeśli operuje się duże mięśniaki lub chora jest otyła, a także aby umożliwić usunięcie okołoaortalnych węzłów chłonnych (film wideo 2, www.contemporaryobgyn.net/port_placement_side_docking).
Po odpowiednim umieszczeniu portów następuje podłączenie robota i jego ramion do właściwych portów. W zależności od rodzaju wykonywanej operacji robot jest ustawiony na poziomie biodra chorej (tzw. ustawienie boczne), ramion lub krocza. Podczas większości operacji wykonywanych w obrębie miednicy zaleca się stosowanie ustawienia bocznego, które umożliwia wygodny dostęp do pochwy. Robot powinien wówczas stać po stronie portów 1 i 3.
Narzędzia
Skuteczne przeprowadzenie operacji z użyciem robota wymaga zastosowania właściwych narzędzi. Przez port 2, czyli przeciwnie do ręki dominującej, wprowadza się bipolarny grasper służący do chwytania tkanek, koagulacji i zamykania naczyń. Monopolarna szpatułka, nożyczki elektryczne lub nóż harmoniczny umieszcza się zazwyczaj w porcie 1 po stronie ręki dominującej, by ułatwić preparowanie tkanek. W naszym ośrodku wolimy używać szpatułki do preparowania za pomocą ręki dominującej, chociaż taka pozycja nie pozwala na rozsuwanie i oddzielanie tkanek w celu odnalezienia płaszczyzny preparowania. Jeśli konieczne jest zastosowanie tej techniki chirurgicznej, lepiej posłużyć się nożyczkami elektrycznymi lub nożem harmonicznym. Zaletą noża harmonicznego jest możliwość uchwycenia tkanek jego tępymi końcówkami, czego nie zapewniają nożyczki elektryczne. Przez port 3 wprowadza się zwykle pęsetę, którą odciąga się tkanki, by ułatwić preparowanie.
Wskazówki pomagające uniknąć powikłań
Przyczynami powikłań operacji wykonywanych z użyciem robota mogą być: niesprawne działanie systemu robota, wady narzędzi, brak doświadczenia chirurga, uszkodzenia tkanek przez trokary oraz niewłaściwa technika chirurgiczna. Opisywano występowanie awarii systemu robota w trakcie 2,4% operacji z zakresu chirurgii ogólnej oraz 4,5% operacji urologicznych i operacji ginekologicznych wykonywanych z powodu nowotworów.11-13 Nie opisano żadnego przypadku zgonu, a konwersji do operacji otwartej wymagało <1% chorych.
Wśród opisywanych problemów z narzędziami najczęstsze są wady izolacji końcówek monopolarnych nożyczek robota (monopolar scissors tip cover accessory, MSTCA). Właściwa izolacja zapobiega przebiciom prądu z powierzchni innych niż końcówka nożyczek. Autorzy prospektywnej analizy stwierdzili, że w systemie MSTCA pierwszej generacji widoczne wady izolacji występowały z częstością sięgającą niemal 40%, a problemy polegające na powstaniu łuku elektrycznego występowały w 33%.14 Zauważyli też, że łuk elektryczny powstaje częściej przy większym zgięciu nadgarstka i użyciu większej mocy. Wady izolacji występowały już podczas pierwszego użycia narzędzia. W badaniu nie obserwowano takich zaburzeń podczas wykorzystywania MSTCA drugiej generacji. W innym badaniu częstość wad izolacji była podobna (33%), ale gwałtownie zwiększała się do 80% po dziesięciokrotnym użyciu narzędzia.15 Uświadomienie sobie możliwości wystąpienia takiego powikłania jest szczególnie ważne, jeśli podczas preparowania i koagulowania tkanek wykorzystuje się głównie nożyczki monopolarne.
Dobrze udokumentowano śródoperacyjne powikłania operacji ginekologicznych z użyciem robota wykonywanych zarówno z powodu schorzeń łagodnych, takich jak usunięcie przydatków, mięśniaków macicy, wycięcie macicy z przyczyn łagodnych lub podwieszenie szyjki macicy do kości krzyżowej, jak i operacji z powodu nowotworów złośliwych – histerektomii, chirurgicznego ustalania stopnia zaawansowania raka trzonu macicy, radykalnej histerektomii oraz zmniejszenia masy nowotworu u chorych na raka jajnika.6,16-32 Odnotowywana w badaniach retrospektywnych częstość występowania powikłań operacji z użyciem robota wyniosła 2-10%. Były to głównie uszkodzenia jelita, naczyń, pęcherza moczowego, moczowodu lub nerwów. Powikłania te występują rzadziej niż w trakcie operacji otwartych, a retrospektywne porównanie wyników przebiegu pooperacyjnego po histerektomii z użyciem robota z przebiegiem po histerektomii laparoskopowej nie wykazało różnic.33
W kolejnym prospektywnym randomizowanym badaniu klinicznym z grupą kontrolną nie stwierdzono różnic między powikłaniami po histerektomii całkowicie laparoskopowej wspomaganej przez robota a powikłaniami po konwencjonalnej histerektomii całkowicie laparoskopowej.34 We wszystkich przytoczonych doniesieniach trudno było ustalić czynniki odpowiedzialne za wystąpienie powikłań. Niewykluczone, że należą do nich brak porozumienia między operatorem a asystentem pracującym przy stole operacyjnym w trakcie wymiany narzędzi, niewłaściwe śledzenie ruchu narzędzi, uszkodzenia termiczne w następstwie efektu sprzężenia oraz brak wyczucia, z jaką siłą tkanki są odciągane przez ramiona robota.
Przyczyną powikłań bywa też brak doświadczenia operatora lub niewłaściwy dobór chorych do operacji wykonywanych na wczesnym etapie krzywej uczenia się. Zachęca się zatem do wykonywania ćwiczeń z robotem oraz zaleca odpowiedni dobór prostych operacji we wczesnym okresie uczenia się. Operator powinien umieć radzić sobie z problemami i być świadomym potencjalnych wad narzędzi.
Należy dobrze opanować technikę operacji z użyciem robota, czyli porozumiewać się z asystentem wymieniającym narzędzia, śledzić ruchy narzędzi oraz poruszać nimi tak, aby zapobiegać uwolnieniu energii w następstwie efektu sprzężenia. Trzeba też unikać silnego odciągania tkanek oraz gwałtownych, nerwowych ruchów, by zminimalizować uszkodzenie tkanek w trakcie preparowania.